設計解析プログラムKMAPは簡単に使うことができます.航空機の飛行制御問題だけでは
なく,自動車,船,水中ビークル,ロボット,工作機械などの制御問題,また振動工学の解析も
可能です.その他,構造物の弾性解析,流体力学の問題,熱の流れの解析,最適化の解析の
各種工学解析手法の基礎も例題を通して学ぶことができます.
特に,制御系解析ツールは技術者にとっては電卓のsin, cosと同じように単なる計算道具です.
難しい制御理論は後にして,とにかく使えるようにしておくと便利です.そういう意味で,だれでも
簡単に使える制御系解析ツールKMAPの普及活動に力をいれています.
KMAP(ケーマップ)は次のような機能を持っています.





機体諸元(重量,慣性モーメント等),空力データ,制御則,パイロット操舵を入力することにより
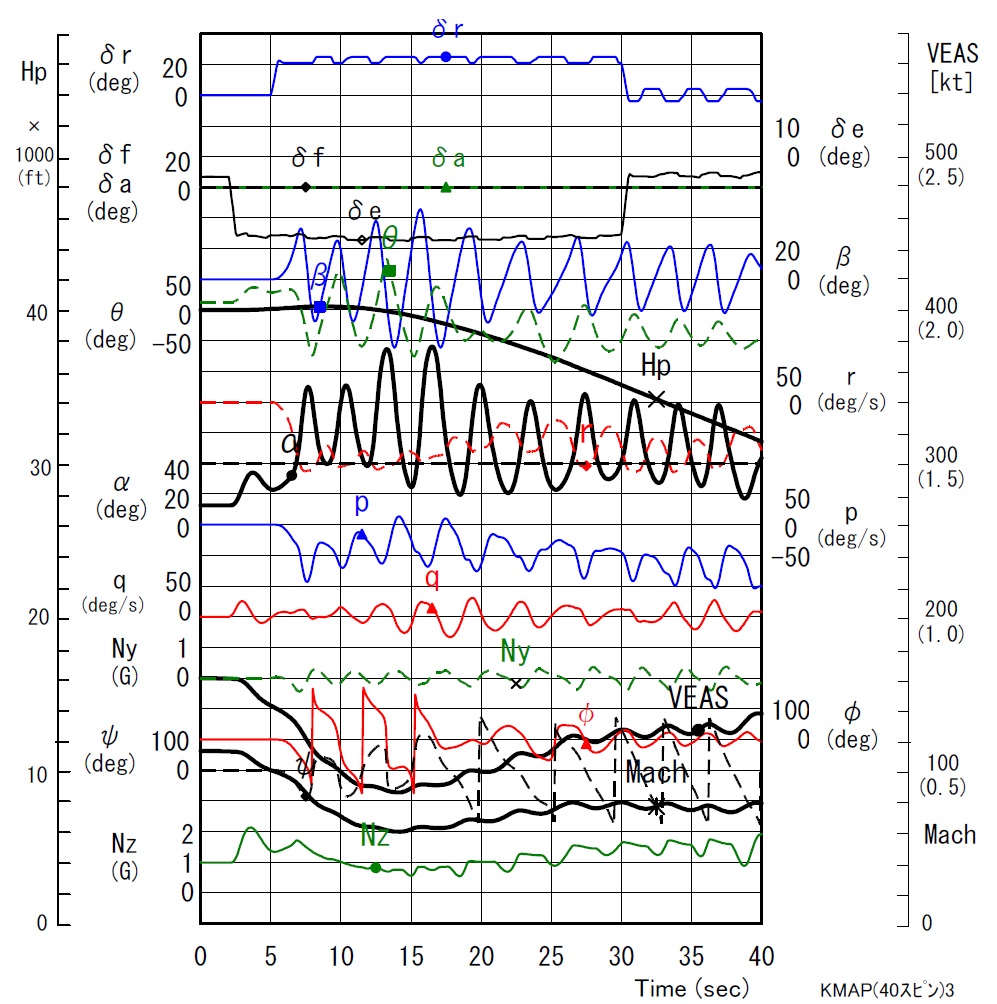
飛行機の運動がシミュレーションできます.KMAPによる解析結果は,下記の図のようにExcel を
利用して表示することができます.Excel 図は各種メニューが用意されています.
(飛行機の三面図も簡単に描くことができます)

(下図のように飛行機の運動をアニメーションで確認できます)
「Duch_roll.wmv」をクリックすると,ダッチロール運動が再生できます.

「垂直離陸.wmv」をクリックすると,
飛行機の垂直離陸の運動が再生できます.

「旅客機のホバリング.Y130609.wmv」をクリックすると,旅客機がホバリング後、
前進飛行から右旋回する運動が再生できます.

運動解析プログラムKMAPは,飛行機の運動解析,制御系設計解析(古典制御から現代制御
まで),飛行機の概念設計(含む空力微係数推算)などの各種解析が可能です.
例えば,飛行機の運動方程式は知っていても自分でシミュレーションプログラムを作って解析
するのは簡単ではありません.たとえ計算できても正しい答えであるかの検証は難しい作業です.
KMAPは飛行機の運動方程式は既にプログラム化されていますので,ユーザーは空力微係数,
機体諸元,アクチュエータ性能値などをインプットデータとして入力すれば直ちに運動シミュレ
ーションができます.
また,飛行制御則もインプットデータにより定義することが可能です.KMAPは入門者に
理論だけでなく,実際に計算を行うことで理解を深めて欲しいとの考えから開発したものです.
ユーザが簡単に使えるように適宜改善しています.
飛行機の飛行特性解析(安定性・操縦性の解析)についての詳細
な検討結果が簡単に得られます.
安定性・操縦性の解析とは,飛行機の尾翼の設計に対応します.6自由度の運動方程式を解く
必要がありますので,これまでは時間のかかる作業でした.KMAPを用いると,性能要求を満足
する機体諸元(機体重量,主翼面積等)を求めた後,安定性・操縦性の解析を行い,設計基準を
満足するかどうかを表示します.
具体的には,以下のような解析を行います.
【縦系の飛行特性解析】 (機体固有および制御系含み)
①長周期モードの減衰比と振動数
②速度安定の条件
③飛行経路安定
④短周期モードの減衰比と振動数
⑤短周期モードのωsp・Tθ2
⑥短周期モードの加速感度n/α
⑦短周期モードのCAP (Control Anticipation Parameter)
⑧縦静安定と重心後方限界
⑨CAPによる重心後方限界
⑩離陸引き起こしと重心前方限界
⑪転覆角と重心後方限界
⑫重心許容範囲と 主脚位置

【横・方向系の飛行特性解析】 (機体固有および制御系含み)
①ダッチロールモードの減衰比と振動数
②ダッチロールの|φ/β|とζd・ωnd
③ロールモードの時定数TR
④スパイラルモードの振幅倍増時間T2
⑤エルロン操舵時のロール角速度振動
⑥ロール性能
⑦定常横滑り能力
定常横滑り能力の例 (横滑り角β=10°)

これらの飛行特性解析は,機体固有と制御系含みの2つの場合について,解析結果を表示し
ます.特に,制御系を含んだ場合の飛行特性解析はこれまで難しい領域でしたが,KMAPでは
自動的にシミュレーション計算等を行って解析を可能にしました.飛行機設計の時間が大幅
に短縮できます.
与えられた機体形状に対して空力データを推算して出力します.
与えられた機体形状に対して空力データを推算し,性能要求値を満足する機体諸元
(重量,翼面積等)を出力し,設計結果を3面図として表示します.模型飛行機から旅客機
まで各種飛行機を設計できます.
(下記の機体3面図は,KMAPの解析結果で描いたものです.)



例として,800人乗りの超大型旅客機を試設計してみましょう.航続距離15,000km,離陸
滑走路長3,000m以下,着陸滑走路長2,000m以下としてKMAPで設計した結果は次のように
なりました.

航続距離 R =15,000km
離陸滑走路長 sTO= 3,000m
着陸滑走路長 Ld= 1,620m
接地速度 VTD= 120kt
離陸重量 WTO = 543tf
着陸重量 WLD = 319tf
自重 Wempty= 225tf
燃料重量 Wfuel = 238tf
ペイロード Wfixed= 80tf
離陸推力 (T)to= 118tf
主翼面積 S = 824 m2
スパン b = 78.6m
アスペクト比 A = 7.5
平均翼弦 CBAR= 11.4m
前縁後退角 ΛLE= 41deg
翼面荷重 WTO/S= 659kgf/m2
推力重量比(T/W)to= 0.218
このように,離陸重量543トン,スパン(翼幅)78.6mの機体が得られました.KMAPでは
3面図も上記のように簡単に描くことができます.
また,KMAPでは設計と同時に空力微係数が推算されます.
<空力微係数推算結果(着陸形態)>
CLα=0.1012(1/deg).........................Cyβ=-0.01584(1/deg)
CLδe=0.00540(1/deg)....................Cyδr=0.00304(1/deg)
CLδf=0.0237(1/deg).......................Clβ=-0.00463(1/deg)
Cmα=-0.0272(1/deg).....................Clδa=-0.001138(1/deg)
Cmδe=-0.0203(1/deg)...................Clδr=0.0001355(1/deg)
Cmδf=-0.00743(1/deg).................Clp=-0.419(1/rad)
Cmq=-27.0(1/rad)..............................Clr=0.321(1/rad)
Cmαdot=-8.57(1/rad).....................Cnβ=0.00300(1/deg)
k=0.0518(-).........................................Cnδa=-0.0000208(1/deg)
CD0(F/UP,G/UP)=0.01667(-).....Cnδr=-0.001613(1/deg)
CD0(F/DN,G/DN)=0.0507(-).......Cnp=-0.00438(1/rad)
CD|δf|=0.001202(1/deg)................Cnr=-0.293(1/rad)
.
この空力微係数を用いて,KMAP内では飛行特性解析,制御則設計,シミュレーションなど
各種の解析が簡単に行えます.
飛行機以外の一般の制御系の設計解析も可能です.
極・零点配置
根軌跡
ボード線図
ベクトル軌跡
各種フィルタ演算
固有値計算
リカッチ方程式計算
最適制御
H∞制御
など,古典制御から現代制御までの種々の設計法が準備されています.
下記に航空機のピッチ角制御におけるLQI(サーボ系)の例を示します.縦系のピッチ
角コマンドθm に対して機体のピッチ角θ を追従させる積分型最適制御系です.

飛行機のピッチ角LQI最適制御ブロック図
(このブロック図をクリックすると大きく見ることができます)
このときのシミュレーション結果を次に示します.ピッチ角θが目標値に良好に追従して
いる様子がわかります.
(詳細は,本の紹介(3)をご覧ください)

Z接続法とは,制御系の情報をZ変数でつなぐことで制御系を構成していく方法です.
これによって構成された制御系は,KMAPツールを用いてシステムの極・零点配置や周波
数特性などを良好な特性にすることができます.

一般的に,システムの特性を表す伝達関数(入力に対する出力の特性をラプラス変換した
もの)は上記のように,積分,1次遅れ,ハイパス,リードラグ,2次遅れ,2次遅れの微分,
ノッチフィルタの要素の組み合わせで表すことができます.Z接続法では,この原理により,
これらの各要素の入出力にZ番号を付与して,システム要素間の情報の流れを加減算すること
によって制御系を作り上げるものです.例題をいくつかご紹介します.
【例題1】航空機のラダー系の安定化制御

図1 航空機のラダー制御系ブロック図
図1に示すラダー制御系について,ゲインKとリードラグ時定数T1およびT2を,Z接続法
ゲイン最適化によりシステムを安定化するように決定してみましょう.KMAPのインプッ
トデータは次のように簡単です.図1のブロック図を順番にZ番号で接続していくだけです.
このデータの後に,求めるゲインが記述してある行数を定義しておきます.このケースでは,
92,93,94行目です.

ゲイン探索の範囲を指定して解析を実行すると,100万回のゲインの組み合わせの中から
最適解を表示します.図2は安定解の存在範囲で,図の中の黒い点が極の位置を示しています.

図2 安定な極の存在範囲
得られたゲインを用いて,図1のRGAINを変動させて描いた根軌跡が図3です.左半面45°の
非常に安定した位置に極が移動していることがわかります.

図3 Z接続法ゲイン最適化により得られた根軌跡




このように,KMAPを用いたZ接続法ゲイン最適化手法により,安定な制御系が簡単に
設計できますので,ぜひ使ってみてください.
下記の船の運動(付加質量,付加慣性モーメントを考慮)解析も可能です.

下記は自動車の外乱運動特性の例です.


下記の2リンクマニピュレータ制御系解析も可能です.


下記の工作機械の位置決め制御系解析も可能です.


下記は有限要素法による片持ちはりの曲げ解析の例です.


下記は差分法による円柱まわりの流れの解析例です.

下記は準ニュートン法を用いた最適制御の解析例です.


(片柳亮二)